
# 巡线机器人6--超声波
智能仓库里的机器人成群结队,避免发生碰撞,是十分重要的事。
# 情景分析
- 结合之前接触过的超声波传感器,让机器人可以在有阻挡时停下来,多个机器人排队巡线,避免碰撞。
# 流程解析
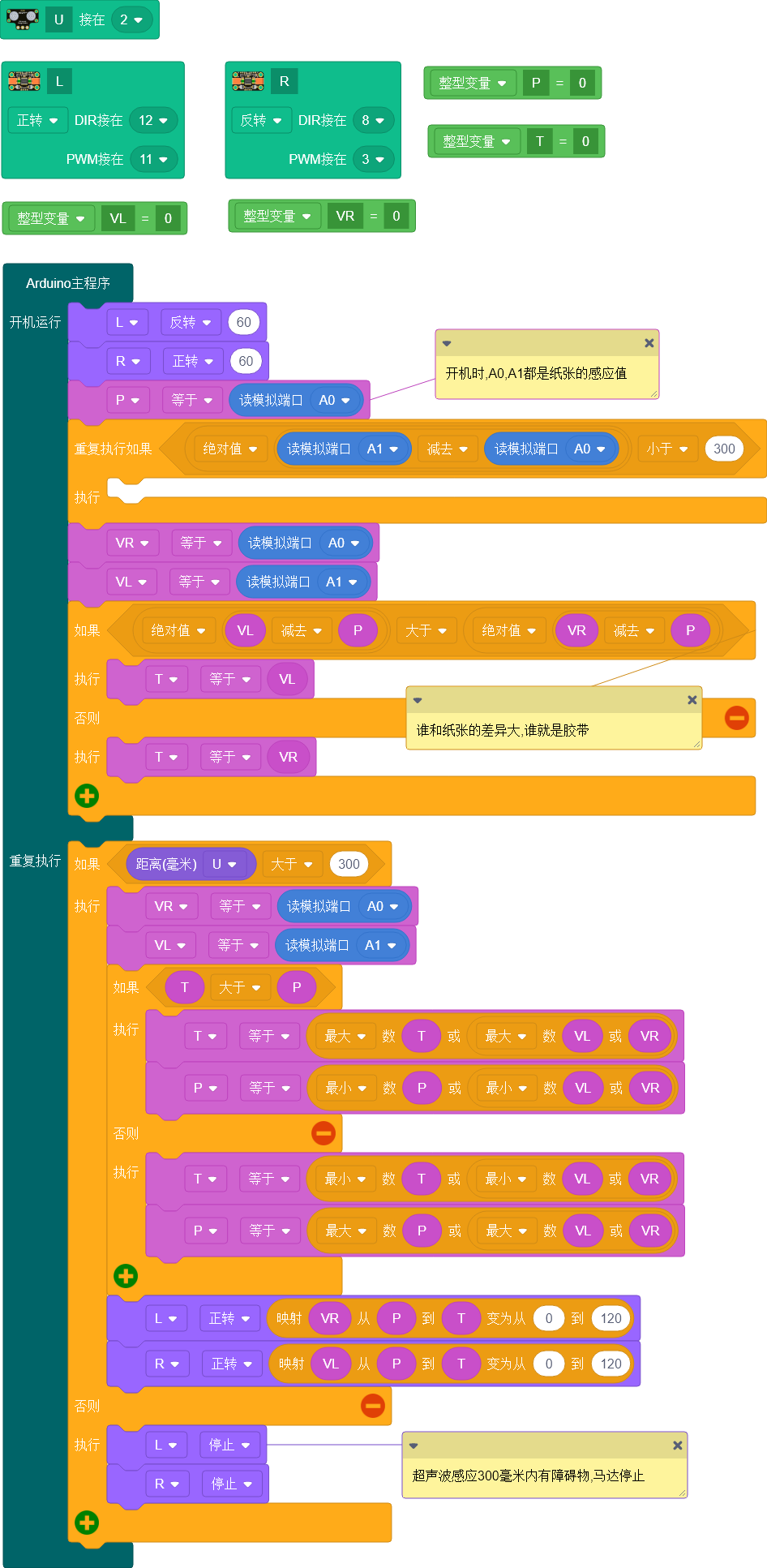
- 程序开始需要定义变量P,T,VL,VR。
- 开机后,红外反射传感器是对着纸张的,先记保持纸张感应值
P = analogRead(A0) - 开机后机器人随意一个方向转弯,我们已经有了纸张的参考值,转弯以后,无论那一边先碰到胶带,都会出现跟纸张参考值相差很大的感应值,看看谁和P的差异大,就把谁保持到变量T。
- 程序进入loop,超声波模块检测障碍物距离
- 如果障碍物距离比较远,继续巡线过程,如果障碍物比较近,设置马达速度为0,机器人暂停移动。
# 参考程序
- oseppBlock IDE程序
- Arduino IDE程序
#include <oseppRobot.h>
OseppRangeFinder U(2);
OseppTBMotor L(12, 11);
OseppTBMotor R(8, 3, LOW);
int P = 0;
int T = 0;
int VL = 0;
int VR = 0;
void setup() {
L.backward(60);
R.forward(60);
P = analogRead(A0); // 开机时,A0,A1都是纸张的感应值
while (abs(analogRead(A1) - analogRead(A0)) < 300) {
}
VR = analogRead(A0);
VL = analogRead(A1);
// 谁和纸张的差异大,谁就是胶带
if (abs(VL - P) > abs(VR - P)) {
T = VL;
} else {
T = VR;
}
}
void loop() {
if (U.ping() > 300) {
VR = analogRead(A0);
VL = analogRead(A1);
if (T > P) {
T = max(T, max(VL, VR));
P = min(P, min(VL, VR));
} else {
T = min(T, min(VL, VR));
P = max(P, max(VL, VR));
}
L.forward(map(VR, P, T, 0, 120));
R.forward(map(VL, P, T, 0, 120));
} else {
// 超声波感应300毫米内有障碍物,马达停止
L.forward(0);
R.forward(0);
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
# 运行结果
同之前一样放置机器人。打开电源,机器人找到胶带后尝试跟着走。测量到有障碍物时暂停。
# 课程解读
- 我们去掉了机器人对于开机时转身方向的假设。现在巡线机器人只要求两个条件:胶带和纸张感应值要大于300,开机时站在胶带上传感器对着白纸。
- 速度较快时机器人有时会频繁摆动,我们的程序使用了PID控制的P比例控制。加上I积分,D微分控制能改善这个问题。
# oseppBlock操作视频
# ArduinoIDE操作视频
# 巡线机器人--总结
巡线机器人系列教程主要知识点为变量和数学,如果你是编程初学者,可能仍会觉得变量有些复杂,请坚持尝试使用,慢慢地就熟练了。看看最后的代码,对于机器人编程,代码是非常少的,但是如果不用变量,代码就会增加很多。使用变量能降低了编程的难度和结构复杂度,还可以避免重复计算,加快程序的运行速度。如果没有变量有些功能是实现不了的。
机器人一步步地学会了巡线,我们至今都不知道,最重要的依据:胶带、纸张的感应值大概是多少。甚至后两节程序都没有完整地思考功能实现的原理,只是根据逻辑改进之前的程序。如果你想让机器人做到一些你觉得复杂的事情,可以先放宽要求,再一步步去掉条件。尤其是逻辑和概念比较多的事情。通过逻辑来实现的功能,不要求具体的数字,还能有更好的适应性。
# 巡线机器人系列课程中提到的知识点
- 红外反射传感器的使用,模拟量的读取。
- 变量的定义,使用方法,变量名的要求。变量运用要注意变量的类型和范围。
- 数学运算
+(加),-(减),*(乘以),/(除以),%(模除)以及绝对值函数abs。 - 逻辑运算
A&&B(与运算),A||B(或运算),!A(非运算)。 - 最大值函数
max(a,b),最小值函数min(a,b)。
# 附:PID控制的巡线程序
默认启用PID控制,"L"指示灯灯亮。使用杜邦线将A5接到GND,则程序单独使用P控制,"L"指示灯灭。
PID控制并不能提高最高速度,只能提高巡线的流畅程度。通过平稳速度来减少调整姿态的时间。
程序中给定的参数并不是最优参数,如果有兴趣请搜索PID参数整定。
待改进:程序中的超声波测量时间是变化的,这影响了PID的周期。需要将PID控制代码用定时器定时执行,loop函数内只负责超声波检测。如果只想看看能带来多少改善,请将if (U.ping() > 300)修改为if(1)来试试。
#include <oseppRobot.h>
OseppRangeFinder U(2);
OseppTBMotor L(12, 11);
OseppTBMotor R(8, 3, LOW);
int P = 0;
int T = 0;
int VL = 0;
int VR = 0;
float el = 0;
float er = 0;
float el_last = 0;
float er_last = 0;
float el_sum = 0;
float er_sum = 0;
float sl;
float sr;
//p调节,参数代表最高的正常速度。应最先确定p参数。
//单独用P参数控制时,即使存在不稳定,但仍然能保持不脱线的数字就是合适的。
//推荐范围0.3到0.6。每次调整0.1
float p = 0.5;
//d调节起预测调节作用
//在姿态调整初期时发现没有作用,加大调整力度。
//在姿态调整末期,预测可能会调整过头,减小调整力度。
//确定p参数后调整d参数,逐渐增大,机器人的震荡会从改善到恶化过度,选择合适的值。
//推荐范围在20到40。每次调整5
float d = 25.0;
//i调节让机器人不那么敏感地频繁调整,容许些许偏差。i参数最后确定。
//微微增加i参数,改善震荡情况。见好就收。
//推荐范围在0.001到0.005。每次调整0.001
float i = 0.002;
void setup() {
pinMode(A5, INPUT_PULLUP);
pinMode(13, OUTPUT);
L.backward(60);
R.forward(60);
P = analogRead(A0);
while (abs(analogRead(A1) - analogRead(A0)) < 300) {
}
VR = analogRead(A0);
VL = analogRead(A1);
if (abs(VL - P) > abs(VR - P)) {
T = VL;
} else {
T = VR;
}
}
void loop() {
if (U.ping() > 300) {
VR = analogRead(A0);
VL = analogRead(A1);
if (T > P) {
T = max(T, max(VL, VR));
P = min(P, min(VL, VR));
} else {
T = min(T, min(VL, VR));
P = max(P, max(VL, VR));
}
//使用PID计算左边轮子的速度
el = map(VR, P, T, 0, 255);
el_sum += el;
el_sum = constrain(el_sum, -10000, 10000);
sl = el * p + el_sum * i + (el - el_last) * d;
el_last = el;
//使用PID计算右边轮子的速度
er = map(VL, P, T, 0, 255);
er_sum += er;
er_sum = constrain(er_sum, -10000, 10000);
sr = er * p + er_sum * i + (er - er_last) * d;
er_last = er;
//A5端口用作数字端口
if (digitalRead(A5) == HIGH) { //如果是高电平,使用PID控制。
digitalWrite(13, HIGH); //并点亮控制器自带的LED
L.forward(sl); //设置马达速度
R.forward(sr);
} else { //如果是低电平,单独使用P控制。
digitalWrite(13, LOW); //并熄灭控制器自带的LED
L.forward(el * p); //设置马达速度
R.forward(er * p);
}
} else {
L.forward(0);
R.forward(0);
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90