
雷达车上的天线转来转去的扫描,是不是感觉很高科技。我们也可以制作一个,只是我们这里用的是超声波扫描。利用舵机来做巡航动作,超声波来扫描物体。当超声波扫描到障碍物时,就会停下来,并且显示障碍物的距离。
# 部署
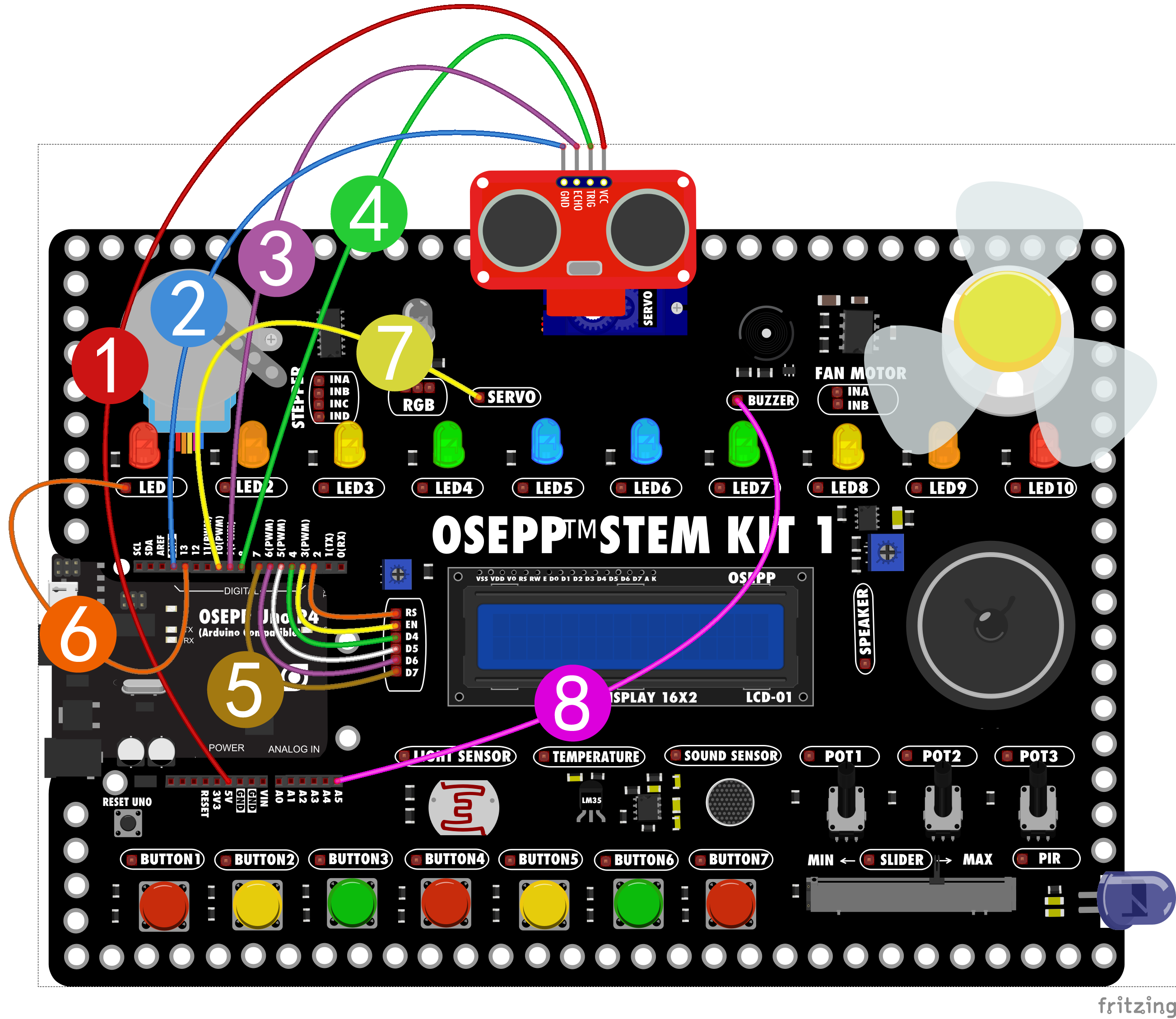
- 超声波模块
VCC接OSEPP UNO的5V。 - 超声波模块
GND接OSEPP UNO的GND。 - 超声波模块
ECHO接到OSEPP UNO的9号引脚。 - 超声波模块
TRIG接到OSEPP UNO的8号引脚。 - LCD的接口
RS-D7分别连接到OSEPP UNO的2~7号引脚。 LED1连接到OSEPP UNO的13号引脚。- 舵机连接到OSEPP UNO的
10号引脚。 - 蜂鸣器连接到OSEPP UNO的
A5引脚。
# 程序搭建
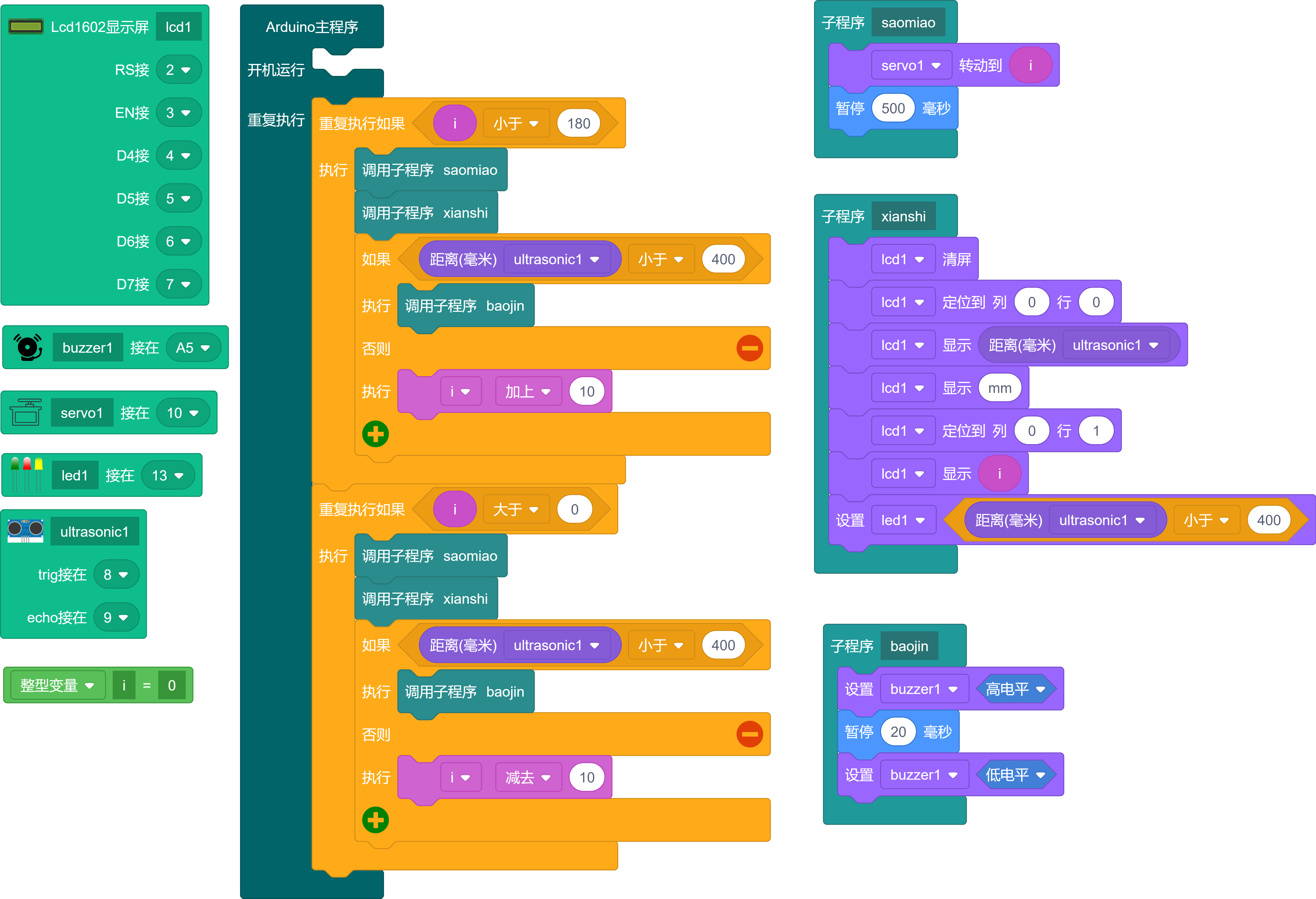
- oseppBlock程序
- Arduino程序
#include <LiquidCrystal.h>
#include <Servo.h>
#include <oseppRobot.h>
LiquidCrystal lcd1(2, 3, 4, 5, 6, 7); //定义LCD引脚
Servo servo1;
OseppUltrasonic ultrasonic1(8, 9); //定义超声波模块引脚
int i = 0; //定义变量i
void saomiao() //子程序,巡航扫描
{
servo1.write(i); //舵机转到变量i
delay(500); //延时500毫秒
}
void xianshi() //显示子程序
{
lcd1.clear(); //LCD清屏
lcd1.setCursor(0, 0); //LCD光标定位
lcd1.print(ultrasonic1.ping()); //LCD显示当前距离
lcd1.print("mm"); //距离单位
lcd1.setCursor(0, 1); //LCD光标定位
lcd1.print(i); //LCD显示当前舵机角度
digitalWrite(13, ultrasonic1.ping() < 400); //距离小于400,LED点亮
}
void baojin() //报警声音子程序
{
digitalWrite(A5, HIGH); //蜂鸣器输出声音
delay(20); //延时20毫秒
digitalWrite(A5, LOW); //蜂鸣器停止输出
}
void setup()
{
lcd1.begin(16, 2); //LCD初始化
//buzzer1
pinMode(A5, OUTPUT);
servo1.attach(10); //定义蜂鸣器引脚
//led1
pinMode(13, OUTPUT); //定义LED1引脚
}
void loop()
{
while (i < 180) //如果变量i小于180
{
saomiao(); //执行扫描子程序
xianshi(); //执行显示子程序
if (ultrasonic1.ping() < 400) //如果距离小于400
{
baojin(); //执行报警程序
}
else
{
i += 10; //否则变量i加10
}
}
while (i > 0) //如果变量i大于0
{
saomiao(); //执行扫描子程序
xianshi(); //执行显示子程序
if (ultrasonic1.ping() < 400) //如果距离小于400
{
baojin(); //执行报警程序
}
else
{
i -= 10; //否则变量i减去10
}
}
}
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
# 运行结果
程序启动后,安装在舵机上面的超声波模块会在0-180度之间巡航扫描。如果在0-180度这个范围内有障碍物,并且障碍物的距离小于400mm时,舵机会停下,LED发光同时蜂鸣器发出报警声。当障碍物被移除后,LED熄灭报警声解除,继续巡航扫描。
# 操作视频
← 综合应用-音乐律动灯 蓝牙BLE遥控教程 →